|
2.
Leap-frog method
Because the central difference method
cannot ensure the equations decoupled, which limits the computational speed,
the leap-frog method is integrated into OpenSees. The leap-frog method has
a simple formula, and can ensure the equations decoupled. However, it should
be noted that there must be no zero element among the diagonal elements of
the mass matrix when using the leap-frog method. However, some elements in
OpenSees have zero inertia for the rotation degree-of-freedoms. Such element
should not be used together with the leap-frog method.
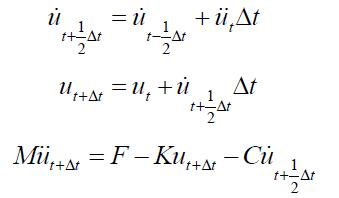
The fundamental equations of the leap-frog
method are shown as follows:
The critical time step size of the leap-frog
method is as follow:

Note that when the leap-frog
method is used with Rayleigh damping, the damping ratio of the higher vibration
modes is overestimated. Consequently, the critical
time step size should be much smaller than that for the implicit method.
3.
Modal damping
The critical time step size of the leap-frog
method is controlled by damping ratio. Because the Rayleigh damping model
is not suitable for the leap-frog method, we added Modal damping into OpenSees.
We made the modal damping as a subclass
of LinearSOE based on the diagonal class because diagonalSOE is suitable for
the leap-frog method. More details can be seen in the codes. In addition,
in order to get the pointers and data from other modules, many codes are added
in some other classes.
The command to use modal damping is shown
as follows:
| |
ModalDamping $Dratio $startfreq $endfreq
$alphaM
|
|
$Dratio is the target damping ratio;
$startfreq and $endfreq specify the frequency range to be controlled;
$alphaM is the mass proportional coefficient of Rayleigh damping. $alphaM
(a1) is introduced here because we often use modal
damping and mass damping together as follow:

$Dratio is the
total damping ratio; Thus, the damping ratio of modal damping
can be calculate by $Dratio
and $alphaM.
Case 3 Earthquake-induced
collapse simulation of a frame structure
Figure 3 shows an eight-story frame structure,
with a total height of 31.5 m. There are 3 spans in the x direction,
2 spans in the y direction and each span is 5 m. El-Centro ground motion
is used as input in the x direction. More details of the modes can
be seen in the Tcl files.
First, when PGA = 510 cm/s2,
the time history of the top displacement is shown in Figures 4 - 6. Then the
PGA is increased to 3500 cm/s2 to perform the collapse simulation.
The top displacement results are shown in Figure 7. It should be noted that
in order to make the leap-frog method work, we added some codes in dispcolumnbeam.cpp
to set the moment of inertia equal to the translational mass. The vibration
periods of the frame with the moment of inertia have little difference with
the original ones.
Figures 4 - 6 illustrate that the mass
& modal damping has better accuracy than using the mass damping or modal
damping only.
Figure 7 shows that the Newmark method
(implicit) encounters numerical problem in convergence, but the leap-frog
method can simulate the entire collapse process.
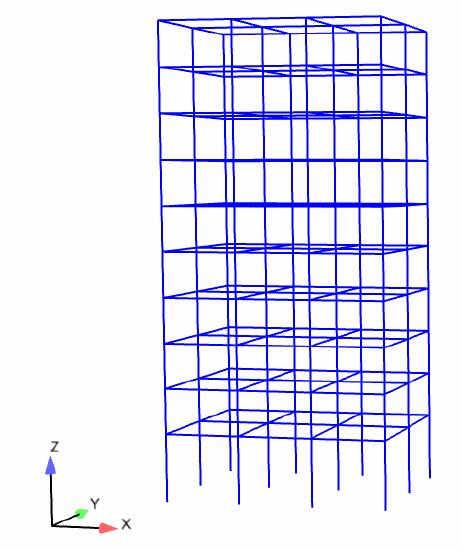
Figure 3 A eight-story
frame structure
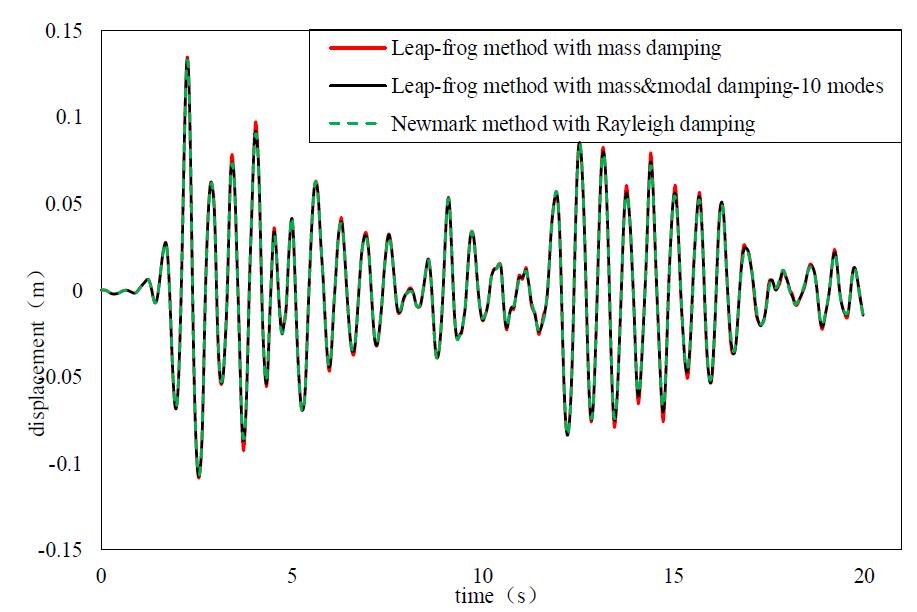
Figure 4 Linear time history
responses of the frame structure (PGA=510cm/s2)
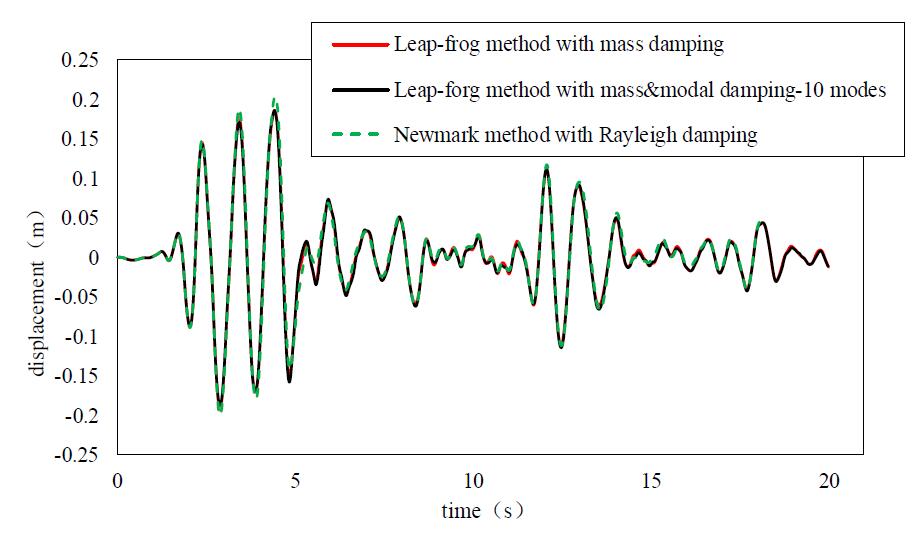
Figure 5 Nonlinear time
history response of the frame structure (PGA=510cm/s2)
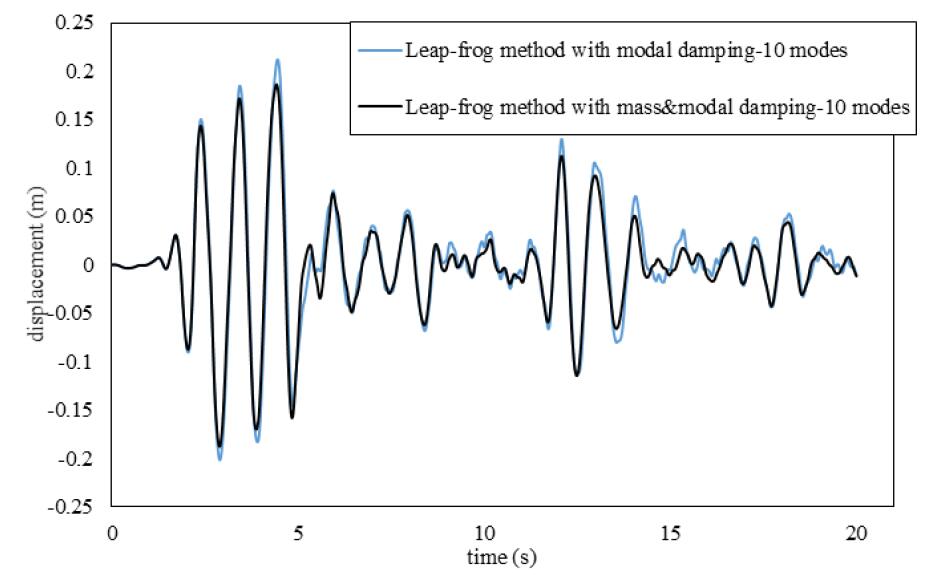
Figure 6 Comparison of
the modal damping and the mass & modal damping
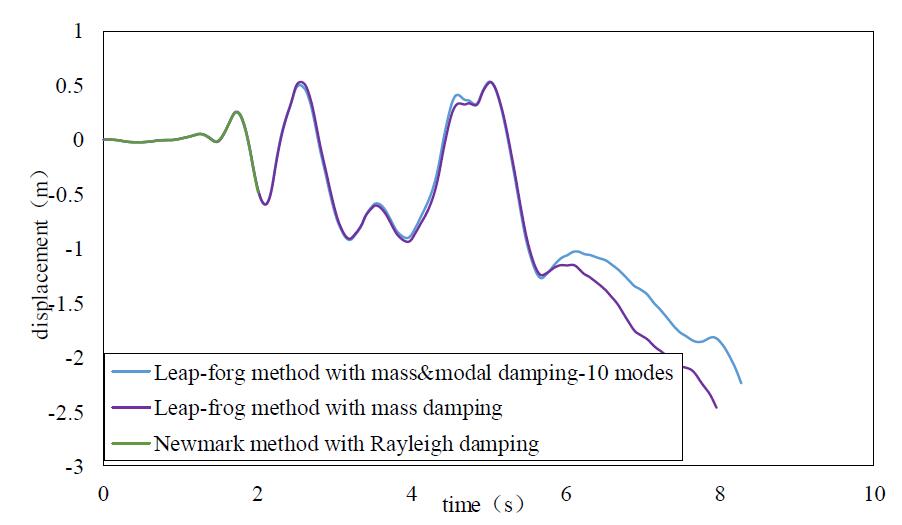
Figure 7 Collapse simulation
of the frame structure (PGA=3500cm/s2)
|